一、 核心结构原理与受力机制

交叉滚子轴承由剖分式内 / 外圈、圆柱滚子、间隔保持器三大组件构成,圆柱滚子沿滚道以 90° 夹角交替正交排布,相邻滚子承载方向垂直,V 型一体化滚道形成四向承载接触面。
结构两大标志性设计:
剖分套圈:内圈分割或外圈分割,装配后通过锁紧螺栓预紧消除游隙,可实现零间隙预紧状态,从根源抑制关节受力倾斜;
线接触承载:滚子与滚道为全长度线接触,区别于球轴承点接触,同等截面高度下有效承载接触面积提升 4 倍以上,弹性变形量大幅降低。
核心受力机制深度解析:
在机械臂关节的典型工况中,末端负载、臂杆自重与加减速惯性力叠加会产生巨大的倾覆力矩。普通轴承必须成对串联(如双列角接触球轴承)才能抵消弯矩,这不仅导致结构体积翻倍,多配合面累积的间隙还会降低整体刚性。相比之下,交叉滚子轴承通过其独特的 90° 正交排布,使得垂直方向的滚子分别承担径向力与双向轴向力,而 V 型滚道面则共同抵御倾覆力矩。这种 “单套承载复合载荷” 的机制,使其轴向截面高度仅为传统组合轴承的 1/2~1/3,完美适配关节模组轻量化集成需求。
二、与普通轴承量化性能对比
统一测试条件:外径 100mm、截面高度 20mm、P4 级精度、同等预紧量、(开式无密封标准轴承)
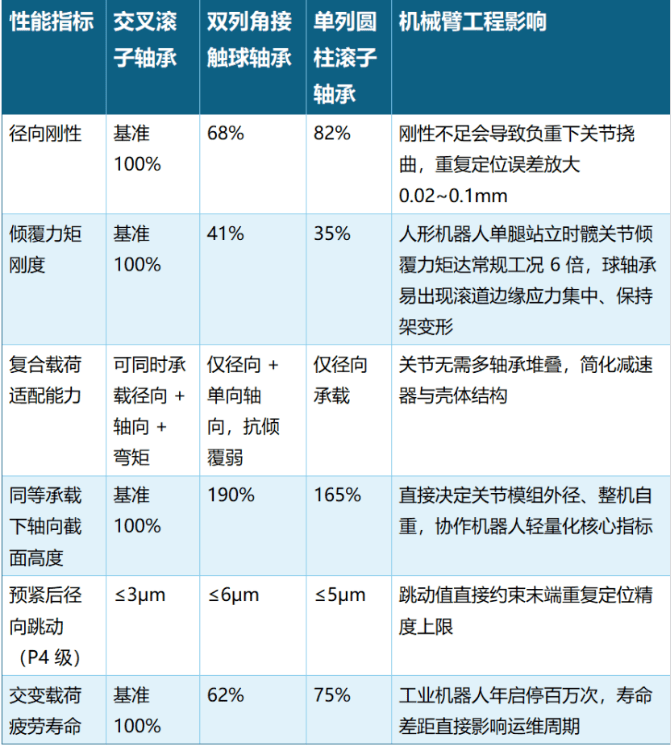
核心结论:如果说减速器决定了机器人的 “力量上限”,那么交叉滚子轴承则决定了机器人的 “动作下限”。任何算法补偿都无法从根本上消除硬件刚性不足带来的物理微颤,其卓越的力矩刚性是消除关节微颤、实现微米级精准复现的物理基石。
三、机械臂内部装配逻辑(RV / 谐波减速器配套方案)
RV 减速器关节(6 轴工业机械臂大关节):交叉滚子轴承作为减速器输出端主支撑,内圈与输出法兰过盈配合,外圈锁死关节壳体,承担整机臂杆全部倾覆载荷,精度需求 P4~P5 级;
谐波减速器关节(协作机械臂、人形机器人腕 / 肘关节):超薄型交叉滚子轴承嵌入谐波刚轮内部,截面高度 5~12mm,要求低摩擦力矩、低转动惯量,精度等级提升至 P2 超精密级;
四足机器人髋膝关节:定制加厚滚道、渗碳强化滚子的重载型交叉滚子轴承,抵御行走瞬时冲击载荷,游隙采用负预紧设计消除动态晃动。

